
케이블이나 로프가 포함된 크레인의 모든 움직임은 부하가 흔들리게 하여 사람과 자산에 대한 위험 요소가 될 수 있습니다. 이러한 움직임은 또한 운송 작업이 오래 걸린다는 것을 의미합니다. 프로세스를 보다 효율적으로 만드는 한 가지 방법은 하중을 한 위치에서 다른 위치로 이동시켜 진자 운동을 유발하는 '흔들림'을 줄이는 것이며, 이 과정은 로딩 크레인에서 케이블 제어에 의해 구현됩니다.

크레인 다이내믹 극대화
안전한 방식으로 생산성 향상
선박이나 부두에 적재물을 올려 놓기 전에 크레인 운전자는 흔들림을 몇 밀리미터로 줄여야합니다. 보조없이 수동으로 작동하는 경우이 프로세스는 평균 이동 시간의 30 % 이상을 차지할 수 있습니다. 생산성을 높이기 위해 Sway Control 시스템은 크레인 처리 시간을 최소화하고 복잡한 작업을 단순화하며 크레인 드라이버를 지원하고 생산성을 높이며 크레인 및 크레인 드라이버의 물리적 손상을 피할 수있는 기회를 제공합니다.
자동 작업 제어
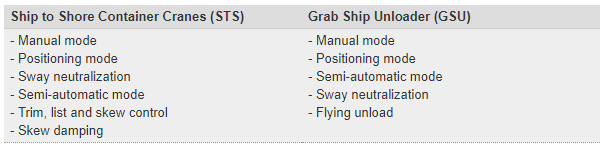
STS 및 GSU 용 SIMOCRANE Sway Control은 수동 및 측위 작업에서의 흔들림을 중립화 할뿐만 아니라 장애물을 고려하여 안전 및 시간 최적화 된 궤적을 갖춘 자동 위치 지정 기능을 갖춘 강력한 흔들림 제어 시스템을 제공합니다.
또한 이 시스템은 GSU 크레인, 트림-리스트-스큐 컨트롤 및 이에 따른 STS 크레인의 스큐 감쇠를 위한 비행 언로드 기능을 제공합니다. 스큐 댐핑은 유압 실린더 또는 추가 전기 드라이브에 의해 수행 될 수 있습니다.
정확한 위치
이 시스템은 인원, 수송되는 물품 및 기계 구조에 대한 스트레스를 감소시키는 높은 수준의 안전을 제공합니다. 자동 제동 제어 기능은 크레인 작업자를 덜어 주며 동시에로드를보다 빠르고 정확하게 배치 할 수 있습니다.
지멘스의 크레인에 대한 광범위한 경험으로 인체 공학적으로 통합된 제어 시스템이 개발되었습니다. 시스템 수정 작업은 숙련된 크레인 드라이버가 수행하는 것처럼 부드럽고 최적화되었습니다. 결과는 크레인 운전자가 높이 평가하는 타의 추종을 불허하는 "자연스러운 느낌"입니다.
SIMOCRANE SC / CeSAR STS, GSU는 다음 크레인 유형에 적합합니다.
* Container cranes (STS)
* Grab ship unloader (GSU)
높은 작동 신뢰성을 위한 통합 및 독립형 Sway 제어 솔루션
작동 원리
크레인 흔들림 제어(Sway Control) 시스템은 수학적 진동 모델의 계산을 기반으로 합니다. 호이스팅 높이, 스윙 각 및 스큐 각은 광학 측정을 통해 카메라로 결정됩니다. 트롤리에 장착된 카메라는 지속적으로 하중 이동을 측정하고 Sway Control System은 크레인이 주행하는 동안 속도를 계산합니다.
다른 제어 알고리즘은 크레인 구성에 대한 높은 생산성 및 최소 응력과 같은 특정 요구 사항을 충족하도록 동작을 조정할 수 있습니다. 고효율 알고리즘은 열악한 시야에서도 높은 작동 신뢰성을 보장합니다.
이 사이트는 사용자 환경을 개선하고 관심 분야에 맞게 맞춤 설정된 콘텐츠를 제공하기 위해 쿠키를 사용합니다. 이 웹 사이트에서 쿠키 사용에 대한 자세한 정보는 개인 정보 취급 방침에 나와 있습니다. 또한 환경 설정을 관리 할 수 있습니다. 이 웹 사이트를 사용함으로써 귀하는 쿠키 사용에 동의하게 됩니다.
더 알아보기
